Copyright (C) V.Skorobogatov, 2007
The reference frames in 4D-model of aether
V.Skorobogatov
It was shown [1] that the null result of the Mickelson-Morley
experiment
might be explained by means of existence of speeds of light both
more and less then standard value c. It may depend from the
velocity of mirror v, from which the light is glanced. Otherwise
the discrepancy in light paths in longitudinal and transverse
directions in the interferometer would be reached the second
power of v/c, where v is the velocity of aether with respect to
the Earth where the experiment is supposed conducted.
Here we take up the meaning of the reference frame in the model
and the question about the so called time delay, that is the one
of the debatable consequence of the theory of relativity.
The application of the Galilean transformation used in the
discussion of the MMX result in [1] demands more grounding for
its using in the form proposed.
For the beginning let us consider two reference frames in 3D
space, K and K'. One of them is at rest and other is in motion
with the constant velocity v. Usually the reference frames is
being chosen with the corresponding axes parallel each other.
Then if the velocity is directed along axis x the Galilean
transformation can be put down like
There is simple mutual relation, or symmetry, between both systems when
they are changing:
We see that only sign of v is changed while the frames is altered.
Time t is not changed under this transformation.
The demand of the collineation of the axes is not strict. One may choose
any orientation for the frame. For example, if the moving frame K'
turned around third axis on the angle α with respect to the
correspondent axis of the frame K, the relation (1) changes to the
following
|
x' = (x - vt) cos(α).
| (3) |
It is needed to note that because the operations of the rotation and
translation are not commute the order of these operations is important.
Here the translation on the distance vt along x proceeds before
the rotation.
Such transformation don't give any new meaning in the consideration
of the movement unless to take into account of broken symmetry between
two systems:
Certainly, the difference in the forms of eqs.(3) and (4) doesn't
indicate that the mutual velocity of the frames is changed. One must
take into account the alteration of the second coordinate when the
direction of the velocity in the system K' is changed. In general
case, the eq.(3) can be writen as
where M is the orthogonal matrix describing the rotation. The inverse
transformation looks like that
The velocity v in one frame transfers into Mv in another one turned
on the angle α.
It was supposed implicitly that the both frames may be connected with
the bodies. In classical physics the material point stands for the body
as the best abstraction but it is not so in 4D-model of the aether. The
approximation of the physical body, as well as a separate particle,
is 2D-object, the string or line crossing the border. Hence the
4D reference frame ought to reconcile with position of the moving
body.
It was shown [1] that the body at
rest with respect to the medium corresponds the line normally directed
to the border of the medium and its motion means the existence of the
tilt. That is why we must turn the moving reference frame if we want
it to be connected with the moving body. The angle of rotation must be
same as the tilt angle of the line. Then if we make a burst in the
direction of movement the observer in that frame didn't notice any
motion of bodies moving with him.
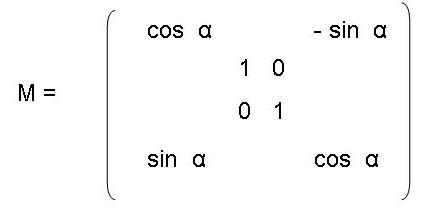
We can describe such rotation in 4D space by matrix
|
 |
(7) |
Here it is supposed that r is 4D radius vector. Note that the rotation
in 4D space is operated not around the single axis but around two axes,
or around plane pulling on these axes. Here it is the plane formed by
second and third axes. Using this matrix in eq.(6) one easily get
|
x = x'cos(α) - z' sin(α) + vt
z = x'sin(α) + z' cos(α)
| (8) |
where z is the forth coordinate of the point in 4D media. Let us
choose the border to be describe by expression
Then if to extract z' from (8), we get from the first equation
exactly eq.(4).
Now if to take into account that in concordance with [1]
eq.(4) can be represented as
|
x' = (x - vt)/√(1-(v/c)²)
| (11) |
It is nothing more then the Lorentz transformation for the spatial
coordinate.
Substituting (10) in the first eq.(8) we get
|
x = x'cos(α) - (z'- ct) sin(α)
| (12) |
It looks like the first part of the orthogonal transformation. We
can construct the second part formally
|
z - ct' = x'sin(α) + (z'- ct) cos(α)
| (13) |
Then substracting it from the second eq.(8) it is easy to get
the following equation
On the other hand, if to set
and to use the determination of the velocity by eq.(10) one get
the Lorentz transformation for the time
|
t = (x'v/c² + t')/√(1-(v/c)²)
| (16) |
To get reciprocal transformation one must put this expression in
eq.(11) and make some simplifications:
|
t' = (-xv/c² + t)/√(1-(v/c)²)
| (17) |
Discussion
To better imagine yourself the meaning of the expressions
obtained here let us consider the Fig.1 where the situation
with two reference frames such as in [1] is presented. Here
coordinate axis y represents any direction in the plane
formed by second and third axes. Together with axis x this
plane composes the 3D space, or "world", corresponded to eq.(9).
It depicted on the Fig.1 as a horizontal plane. Two planes
crossing it were showed as well. They represent the positions
of the moving reference frame at two moments of time, at the
start moment and at the moment t. They are tilted with respect to
the world in such a way that the fourth axes z' indicates to the
moving body denoted by dotted line.
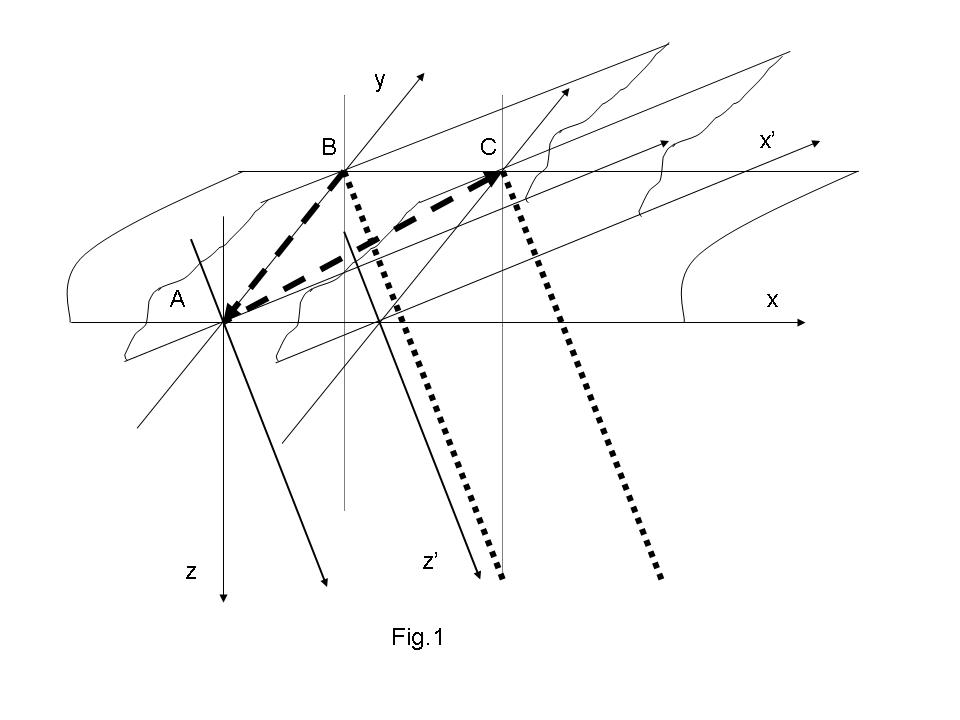 Let us imagine that from the beginning of the rest frame marked
by letter A as well
as from the beginning of the moving frame marked by letter B
simultaneously was emitted the beams of light denoted by dashed
lines. Because the light can be transmitted only within world
with constant velocity c it is easy to get eq.(10). The distance
ct' is the path gone by light from point A to point C where the
beginning of the moving frame will be. Therefore the time t' is
the time needed by light in both coordinate systems. But in
contrast to the rest observer at the point A the observer moving
from point B to point C can not notice that the light goes behind
his coordinate system. The light path AC is not contained in his
reference frame as a whole. The moving observer
can imagine that the light goes from moving (with respect to his
place in opposite direction) observer A to B and conclude that
his time (i.e. time needed to the light signal to pass distance
from his place to the place where must be the other observer) is
delayed. It will not be true if to consider the whole picture in
four dimension. We see that the light in the moving
frame goes only along the mutual crossing of the both coordinate
systems, i.e. along the 2D plane normally disposed to the velocity
vector. The moving observer can not perceive the light pass BA
because it goes off from this plane during the motion.
Let us imagine that from the beginning of the rest frame marked
by letter A as well
as from the beginning of the moving frame marked by letter B
simultaneously was emitted the beams of light denoted by dashed
lines. Because the light can be transmitted only within world
with constant velocity c it is easy to get eq.(10). The distance
ct' is the path gone by light from point A to point C where the
beginning of the moving frame will be. Therefore the time t' is
the time needed by light in both coordinate systems. But in
contrast to the rest observer at the point A the observer moving
from point B to point C can not notice that the light goes behind
his coordinate system. The light path AC is not contained in his
reference frame as a whole. The moving observer
can imagine that the light goes from moving (with respect to his
place in opposite direction) observer A to B and conclude that
his time (i.e. time needed to the light signal to pass distance
from his place to the place where must be the other observer) is
delayed. It will not be true if to consider the whole picture in
four dimension. We see that the light in the moving
frame goes only along the mutual crossing of the both coordinate
systems, i.e. along the 2D plane normally disposed to the velocity
vector. The moving observer can not perceive the light pass BA
because it goes off from this plane during the motion.
Therefore we can tell about the time delay only conventionally as
well as about the length contraction. The distance BC also is not
containing in the moving reference frame but crossing it. From
the moving frame the observer perceives the projection of the real
distances belonging to the world. Formulae of the Lorentz
transformation are true when the condition (15) is fulfilled. Again
the latter corresponds to the plane of the mutual crossing of
the both systems and can not be extended to the whole frames.
Essentially, the first formula (11) is obtained from the Galilean
transformation (8) for the two coordinate systems rotated with
respect to each other. The second formula of the Lorentz
transformation (17) also arose from the Galilean transformation
but under additional proviso given by eq.(15) restricting the
region of consistent space.
Another hint is contained in eqs.(12,13). Expression z - ct is
looks like an argument of some wave function f. For if it is
right to put down the wave equation
Therefore we can imagine that there are two waves moving along
axes z and z' with the light speed c. The former is correspond to
the body at the point A, or to the unmoving observer, and the
latter to the moving body. The value z' - ct divided by the wave
length is correspond to the constant phase of the wave from the
point of view of the fixed observer. Relations (12,13) is about
the changing of the wave phase during the motion.
It help us to describe the emission process in the following way.
The wave existing in some atom inside its fourth dimension reachs
the border, or the world, and make disturbance in it. Because the
phase of the "inner" wave at the moment when it reachs the surface
is arbitrary, the "outer" wave receives arbirary direction. The
outer wave, the visible light, has the same wave length as the
inner one and moving with the same velocity along the border. If
it impacts on the other atom with the suitable parameters it
absorbs by this atom, by atoms' electrons. It approved the
statement made in [1] that the photon is a part of the electron.
The postulates of the relativity theory presuppose the parallel
disposition of the both reference frames. Therefore the changing
of the lengths and times occurs to accommodate with the tilt of
the moving reference frame with respect to the rest one. To speak
it by other words, the moving observer lives in the "imaginary
world" which has only a plane perpendicular to the velocity
vector as a common part with the observer at rest. His world is
produced by the sliding rotation and his estimations of the
lengths and times in it are wrong. It does not mean the special
theory of relativity is not true. It works but don't give the
real picture for the 4D model of the aether. It introduces the
artificial 4D spacetime instead to give the correct result. Here
it is showing how one could interpret it in the real geometrical
space.
[1] V. Skorobogatov. The light in 4D model of the aether.
http://vps137.narod.ru/article2a.html. 2006.